Allgemein passive Prothesen aktive Prothesen elektrische Prothesen Aufbau Methodik Schaftformen Bauteile Steuerungsvarianten
Elektrodensteuerung
Doch nicht alle Patienten bringen diese Voraussetzungen mit und so sind auch deutlich schwächere oder diffuse Signale Praxisalltag. Diese stellen jedoch glöcklicherweise keinen Ausschluss dar, da die Microcontroller viele Optionen bieten, welche die zur Verfügung stehende Signalqualität in praktikable Steuerungsoptionen umsetzen. Neben der bevorzugten proportional von der Signalstärke abhängigen Steuerung stehen auch digitale Steuerungsoptionen zur Verfügung, bei dem das Überschreiten eines Schwellwerts die Bewegung mit einer konstanten Geschwindigkeit startet. Bei nur einem Signal kann die Signalintensität und der Zeitraum zur Erreichung eines Schwellenwertes die Bewegungsrichtung vorgeben. Selbst mit einem einzelnen schwachen Signal kann das willkürliche Öffnen veranlasst werden, während die Prothesenhand bei Abfallen des Signals selbsttätig schließt. Es sind Steuerungsoptionen möglich, bei der mit einem einzelnen Elektrodensignal Öffnen, Schließen, Einwärts- und Auswärtsdrehung einer Prothesenhand umgesetzt werden können.
Dabei muss zweifellos abgewogen werden, ob mit schwachen Signalen das volle Potential hochfunktioneller Passteile vollends ausgeschöpft werden kann, oder ob eine reduzierte Funktionalität vielleicht alltagstauglicher ist. Als Vorgabe aber dient der Funktionsanspruch des Anwenders wobei die technischen Voraussetzungen eine Vielzahl an denkbaren Funktions- und Steuerungsmöglichkeiten sicherstellen können.
TMR
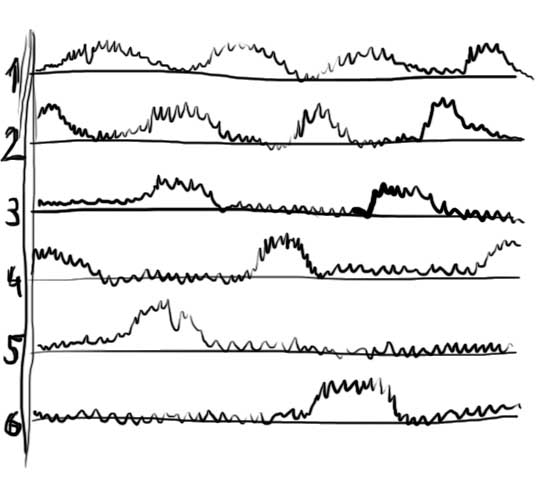
Aktiviert der Patient nun willkürlich einen Muskel, der eigentlich nicht mehr vorhanden ist, so findet die Nervenbahn einen Muskel vor, der diesen Befehl umsetzen kann. Es kommt zu einer Muskelkontraktion in einem ganz anderen Bereich des Körpers. So können etwa bei einer Schulteramputation die unterschiedlichen Innervationsareale des Brustmuskels gezielt angesteuert werden und empfangen forthin die Anweisungen des Nervensystems für die unterschiedlichen Bewegungen der Hand. Greift die Prothese nun in diesen diskreten Arealen die Muskelaktivität ab, sind mit aktuellen Passteilen bis zu 6 Bewegungsrichtungen direkt steuerbar. Zudem ist die Ansteuerung mehrerer Gelenke simultan möglich.
Das Operationsverfahren gehört aktuell zwar noch nicht zu den Standardverfahren, wird aber inzwischen an immer mehr Standorten durchgeführt. Der Heilungsprozess dauert Monate und das Nervenwachstum ist mit nicht unerheblichen Schmerzen verbunden. Die persönlichen Voraussetzungen werden genau geprüft und müssen in ein eng gefasstes Schema passen. Daher ist diese Methode nicht für jeden Patienten geeignet. Langfristig kann diese Option eine Schmerzsymptomatik aber positiv beeinflussen und ganz nebenbei auch eine verbesserte Steuerungsfähigkeit mit sich bringen.
Mustererkennung
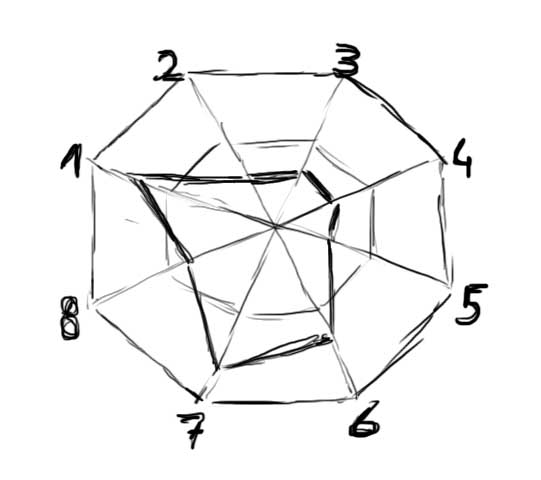
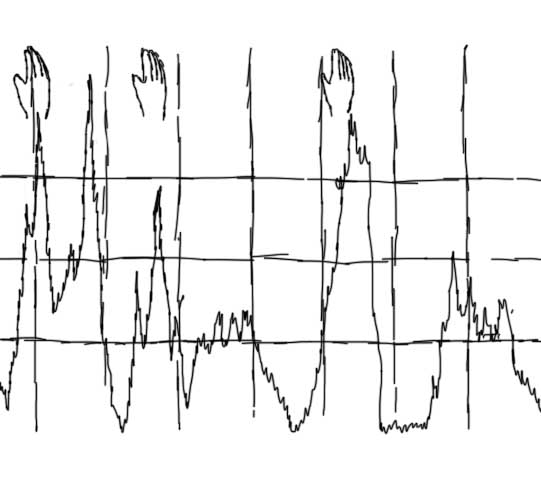
Ziel der Mustererkennung ist die Erfassung von Signalen, aber auch Signalunterschieden mithilfe zusätzlicher Elektroden um den gesamten Stumpf herum. Sind unterschiedlich gerichtete Muskelaktivitäten wiederholt messbar, können aus der entstehenden Signalwolke durch mathematische und statistische Verfahren Muster errechnet werden, die unterschiedlichen Bewegungsintentionen zugeordnet werden können. Dadurch sind unterschiedliche Bewegungs- und Steuerungsrichtungen möglich, die einen zwischengeschalteten Umschaltvorgang mit entsprechender Verzögerung in der Aktion unnötig machen und eine erheblich intuitivere Steuerung ermöglichen. Dieses Verfahren ist nicht auf Amputationspatienten beschränkt, sondern kann grundsätzlich auch bei dysmelen Anwendern genutzt werden.
Augenblicklich sind die wenigen verfügbaren Steuerungssysteme noch nicht endgültig ausgereift und erfordern im Alltag häufige Rekalibrationen, Unklar ist auch aufgrund der unterschiedlichen Versorgungsstandards und -konzepte, welchen Einfluss unterschiedlichen Schaftsysteme und Flexibilitäten auf die Messgrößen haben und inwieweit die über den Tag eintretende Ermüdung statistisch zuverlässig kompensiert werden kann.
Schaltersteuerung
Insbesondere bei Dysmelien mit einer vorhandenen Rudimentfunktionalität bieten sich Schaltersteuerungen an. Unterschiedliche Schalter ermöglichen die Ansteuerung der Prothesenkomponenten durch Druck oder Zug der Rudimente. Die Signale können dabei druckabhängig proportional oder einfache digitale Durchkontaktierungen sein. Die zur Verfügung stehenden Steuerungsvarianten orientieren sich im weiteren Verlauf an den Möglichkeiten der Elektrodensteuerung in Bezug auf proportionale oder digitale Steuerungsmethoden, da die Signalqualität beziehungsweise der Signalkurvenverlauf, nicht aber die Eingangsquelle für den Microcontroller entscheidend ist.
Simultansteuerungen wären auch hier vorstellbar, setzen jedoch eine sehr hohe Funktionalität der Rudimente oder einer stark verkürzten Extremität voraus, die in der Praxis nur sehr selten anzutreffen ist.
Bandagensteuerung
Ob eine mechanische oder eine elektrische Prothese durch eine Bandage gesteuert werden soll macht sich primär in den erforderlichen Zugwegen bemerkbar. Die Bandagenkonstruktionen und Verläufe unterscheiden sich jedoch kaum.
Unterschieden werden im Wesentlichen die
- Neuenerbandage für Unterarmprothesen: eine Schlinge in Form einer 9, die eine Achselschlaufe für die Gegenseite hat, an der ein Zugkabel befestigt ist. Dies hat eine Umlenkung am Schaft im Bereich des Ellenbogens und führt weiter zur Greifkomponente oder einem Schalter. Bei Vorverlagerung der gegenseitigen Schulter und/oder des prothetisch versorgten Armes verlängert sich der Weg und wird in eine öffnende Bewegung der Greifkomponente umgesetzt
- Achterbandage: Eine Schlinge in Form einer 8, die eine Achselschlaufe für die Gegenseite hat, an der ein Zugkabel befestigt ist und die einen Ausleger auch über die betroffene Schulter nach vorne hat. Bei Unterarmprothesen kann der vordere Ausleger der zusätzlichen Stabilisierung dienen. Bei Oberarmprothesen kann hier ein zusätzliches Zugkabel für den Sperrmechanismus des Ellenbogengelenks verlaufen. Bei Vorverlagerung der gegenseitigen Schulter und/oder des prothetisch versorgten Armes kommt es wie bei der Neunerbandage zu einer öffnenden Bewegung. Bei Rückverlagerung des Armes verlängert sich der Zugweg des Ellenbogensperrzuges und das Gelenk wird entweder ge- oder entsperrt.
- Dreizugbandage: Die Dreizugbandage verfügt über eine Achselschlaufe für die Gegenseite, einen Zug zum öffnen der Greifkomponente, einen Zug zur Sperrung des Ellenbogens und zusätzlich einen Zug zum Anbeugen des prothetischen Unterarmes. Bei Vorverlagerung der gegenseitigen Schulter erfolgt die öffnende Bewegung. Die Vorverlagerung der prothetisch versorgten Seite beugt den Unterarm an. Eine ruckartige Rückverlagerung der Seite oder ein Zurückstrecken des Nackens sperrt das Ellenbogengelenk in der gewünschten Position