Allgemein passive Prothesen aktive Prothesen elektrische Prothesen Aufbau Methodik Schaftformen Bauteile Steuerungsvarianten
passive Bauteile
Zu den passiven Bauteilen zählen all jene Passteile, die keine mechanisch oder elektronisch beweglichen Funktionen haben. Dazu zählen unter anderem Prothesenhände für Habitus-Prothesen oder ganze Prothesen mit primär ästhetischem Schwerpunkt, aber auch Arbeitsgeräte oder Prothesen für sportliche Aktivitäten. Zudem fallen alle funktionellen Bauteile, die ein Eingreifen der Gegenseite erfordern in diese Kategorie, sowie genaugenommen Komponenten wie Schaft oder separate Überzüge und Handschuhe.
Auch aktive Prothesen können funktionell durch passiv bedienbare Flexionshandgelenke in ihrem Gebrauchsvorteil erweitert werden.
mechanische Bauteile
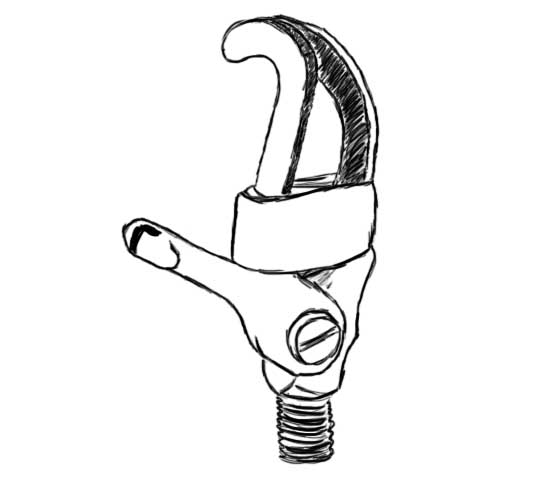
Da mechanische Prothesen in der Historie einen hohen funktionellen Anspruch hatten, die Greiforgane aber nicht alles abbilden konnten, existieren auch heute noch Handgelenksadapter, die einen Wechsel zwischen verschiedenen Greifgeräten und passiven Aufsätzen erlauben.
elektrische Bauteile
Elektrische Prothesen beinhalten Akkumulatoren zur Energieversorgung der motorenbetriebenenen Gelenke und Handpassteile, Ladebuchsen, Schalter oder EMG-Elektroden, diverse Kabel, sowie Microcontroller zur Signalverarbeitung, sperrbare oder aktiv positionierbare Gelenke, Drehmotoren und Steckverbindungen zur Durchkontaktierung der Steuerungssignale zu den Gelenken und der Greifkomponente. Hier sind gegebenenfalls herstellerübergreifende Kompatibilitäten zu beachten und aus der Vielzahl an zur Verfügung stehenden Komponenten diejenigen mit dem passenden Gebrauchsvorteil zu wählen. Dabei spielen nutzungsorientierte Akkukapazitäten, Baugrößen und passteilspezifische Programmierungsmöglichkeiten eine Rolle bei der bedarfsgerechten Auswahl.
Systemhände
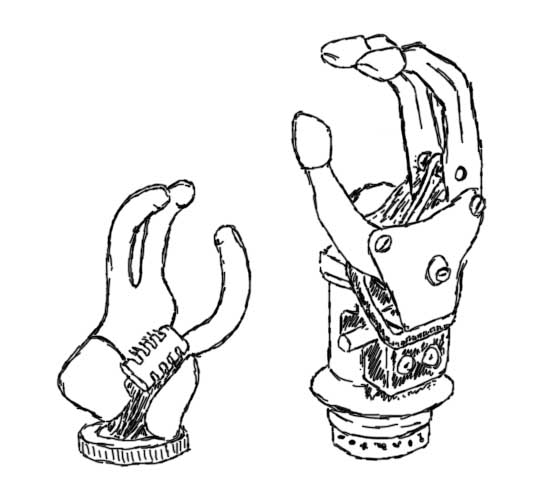
Elektrische Systemhände sind historisch betrachtet eine Weiterentwicklung der mechanischen Greifkomponenten. Neben hakenartige Lösungen für einen robusten, sehr handwerklich orientierten Einsatz, folgen Systemhände einer eher physiologischen Formgebung. Im Vergleich sehen Systemhände wie klassische mechanische Prothesenhände aus, verfügen aber anstelle von Federmechanismen über eine Motor-Getriebeeinheit. Allen Systemhänden gleich ist ihre Griffgeometrie im Sinne eines Dreipunktgriffs mit Daumen, Zeige- und Mittelfinger. Diese sind mechanisch in einem starren Rahmen gekoppelt. Ring- und Kleinfinger sind funktionell von untergeordneter Bedeutung, werden passiv mit den anderen Langfingern mitgeführt und dienen eher dem Ausgleich des physiologischen Erscheinungsbildes. Diese Prothesenhände verfügen über einen einzelnen Motor, der über ein Getriebe die Bewegung in die Finger-Daumengruppe einleitet.
Diese Prothesenhände zeichnen sich durch eine hohe Robustheit, Griffgeschwindigkeit, Griffkraft und eine vergleichsweise einfache Ansteuerung im Sinne einer öffnenden und schließenden Bewegung aus. Die Griffvariabilität ist jedoch auf den Dreipunktgriff und auch die Griffgeometrie auf die vordefinierte Fingerform beschränkt.
multiartikulierende Hände
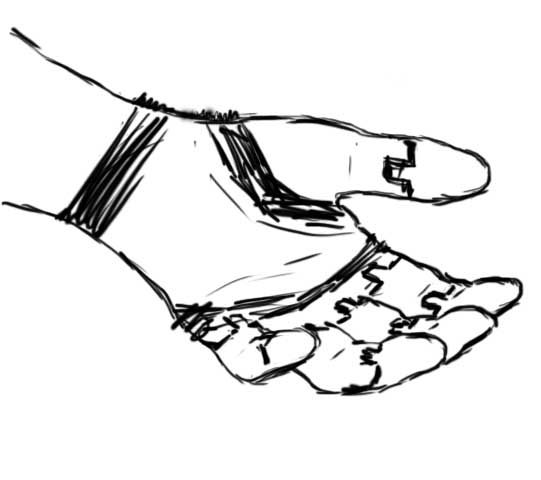
Aktuell sind einige Prothesenhände am Markt erhältlich, deren Griffmöglichkeiten über den klassischen Dreipunkt-Griff weit hinausgehen. Dabei schwanken passteilabhängig die Griff- und Fixierungsvarianten zwischen 3 und 24 Mustern, die zum Teil noch individuell angepasst werden können. Diese Griffvarianten werden durch den Einsatz sehr komplexer Mechaniken oder der Motorisierung einzelner Finger erreicht.
In der Praxis kristallisieren sich im Laufe der Zeit im Wesentlichen nicht mehr als 4 Griffvarianten für die Alltagsanwendung heraus, entscheidend ist aber, dass die Griffvarianten gegenüber dem klassischen Dreipunkt-Griff ein wesentlich erweitertes Nutzungsspektrum ermöglichen. Im Besonderen sei der Schlüssel- oder Lateralgriff genannt, bei dem der Daumen seitlich auf dem Zeigefinger schließt und so eine physiologische Haltung beim beidseitigen Tragen von Gegenständen begünstigt. Einige Prothesenhände ermöglichen feinmotorische Griffmuster wie den Spitzgriff zwischen Zeige und Mittelfinger. Unterschiedliche Griffmuster ermöglichen den Einsatz bei einer erheblich größeren Anzahl unterschiedlich geformter und beschaffener Objekte und der Anwender wird in die Lage versetzt große Gegenstände, wie auch kleinste Gegenstände sicher und zielgerichtet zu greifen. Zudem spielt die Geometrie der Objekte keine große Rolle mehr, da sich die multiartikulierende Prothesenhand selbständig an deren Form anpasst und so jederzeit für einen zuverlässigen Halt beiträgt. Systemhände sind auf den Oppositiongriff limitiert und können eine Griffsicherheit ausschließlich über die Griffkraft generieren, was bei fragilen Objekten die Nutzbarkeit erschwert oder ausschließt. Die Möglichkeit variabler Griffarten reduziert zudem unphysiologische Ausgleichs- und Kompensationbewegungen beim Greifen und Manipulieren von Objekten.
Dabei arbeiten diese Hände aktuell weiterhin typischerweise mit maximal zwei Signalen für öffnende und schließende Bewegungen, während es zum Teil komplexer Signalmuster bedarf um in die jeweiligen Griffmuster zu schalten, bei denen einzelne Finger deaktiviert werden. Somit ist zwar keine natürliche Ansteuerung einzelner Finger möglich, die Griffmuster eröffnen dennoch viele zusätzliche Möglichkeiten und begünstigen einen physiologischen Bewegungsablauf unter Vermeidung von Ausgleichsbewegungen zur Kompensation von ungünstigen Achsabweichungen der Grifffläche.
Prothesenhand - Eckdaten
Die elektronische Handkomponente beinhaltet typischerweise die Elektromotoren und einen Controller zur Signalverarbeitung und Steuerung. Die industriellen Hersteller bieten unterschiedliche Adaptionsmöglichkeiten an und ermöglichen dadurch bei gleichem Innenleben die Verwendung bei unterschiedlichem Angebot bei Bauraum, z.B. kurze Anschlüsse bei langen Stümpfen, oder Schnellverschlüsse zugunsten einer Wechselmöglichkeit zwischen unterschiedlichen Greifwerkzeugen. Je nach Handtyp sind im Falle von Händen mit Schnellverschluss mit Aufbauhöhen zwischen 12,5 cm (Jugendlichen-Systemhand) und 16,5 cm (Erwachsenen-Systemhand) zu berücksichtigen (Daumenspitze bis Basis). Das Gewicht liegt zwischen 400 g und 600 g.
Flexionsgelenk - Eckdaten
Aufbauhöhen:
- mit Erwachsenen-Systemhand: ca. 19,5 cm
Adaption - Eckdaten
Bei unzureichendem Bauraum existieren auch kürzere Anschlussmöglichkeiten, die jedoch in der Regel keinen einfachen Wechsel der Greifkomponente zulassen.
Rotator - Eckdaten
Zudem gibt es die Möglichkeit die Stellung der Hand auch aktiv zu verändern. Die elektrische Rotation kann auf unterschiedliche Arten angesteuert werden und erlaubt eine Verstellung ohne die Notwendigkeit mit der Gegenseite einzugreifen. Bei beidhändigen Tätigkeiten müssen diese daher nicht unterbrochen werden um eine physiologische Haltung einzunehmen. Es kommt nur eine Verwendung in Verbindung mit Schnellverschlusssystemen in Frage und es müssen zusätzlich 4,5 cm Bauraum, sowie etwa 100g Gewicht berücksichtigt werden.
Aufbauhöhen:
- mit Erwachsenen-Systemhand: ca. 21 cm
- mit Erwachsenen-Systemhand und Flexionsgelenk: ca. 24 cm
Akkus - Eckdaten
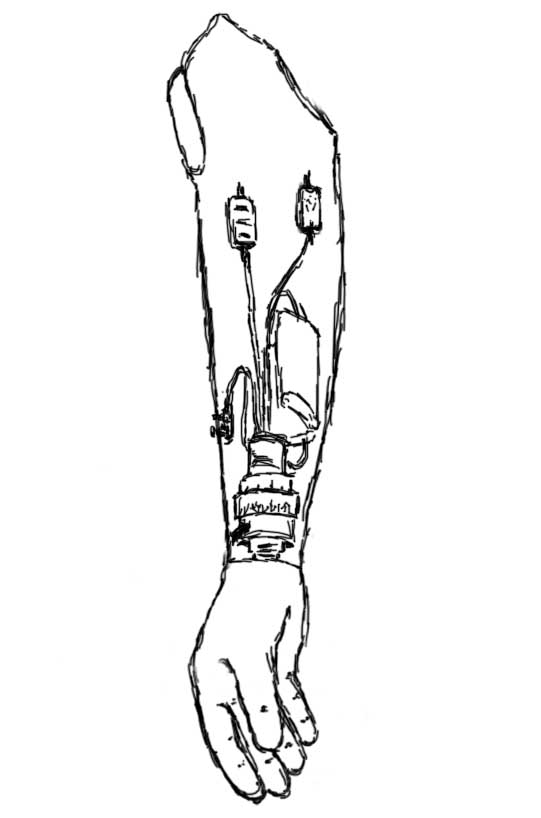
Ellenbogen - Eckdaten
Aufbauhöhen:
- mit Erwachsenen-Systemhand: ca. 41 cm
- mit Erwachsenen-Systemhand und Flexionsgelenk: ca. 44 cm
- mit Erwachsenen-Systemhand, Flexionsgelenk und Rotator: ca. 48,5 cm